
光伏组件EL裁剪工具
光伏组件EL裁剪工具
基于实际项目源码的案例分析教程 项目路径:
EL裁剪工具/
目录
- 项目背景与业务需求
- 整体架构概览
- 目录结构详解
- 技术栈分析
- 计算机视觉核心算法
- 后端 API 设计
- 前端界面设计
- 启动器与部署系统
- 用户认证与权限管理
- 学习系统(偏差累积)
- 无人机拍摄模式
- 项目亮点与可借鉴设计
1. 项目背景与业务需求
1.1 什么是 EL 检测?
EL(电致发光,Electroluminescence) 检测是太阳能电池板生产质检的关键环节。向电池板通电后,缺陷区域(隐裂、断栅、黑心等)会呈现暗区,通过高感光相机拍摄即可发现。
下图是一张实际的 EL 检测照片样本,可以看到电池片在通电后发出暗红色的 EL 光:
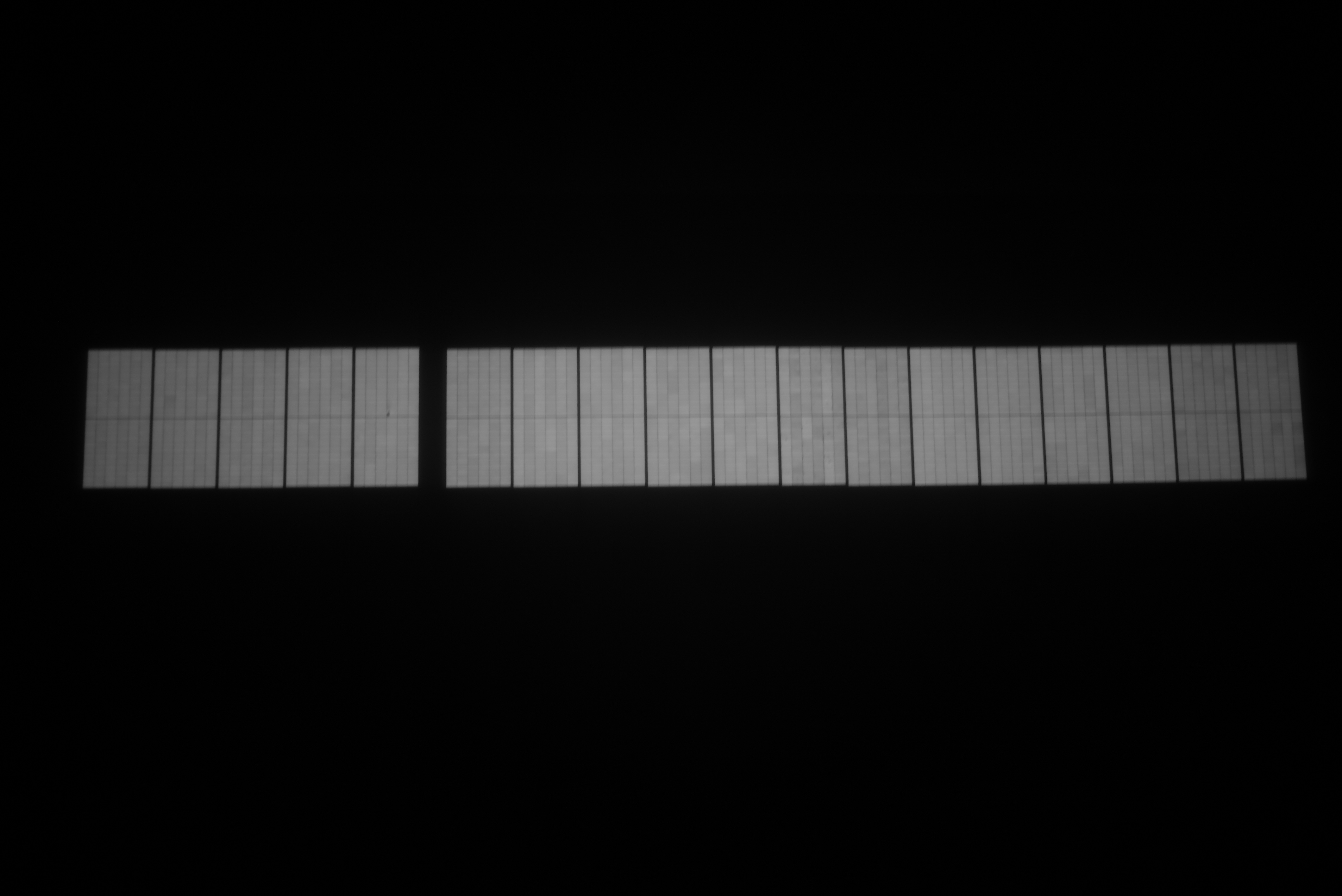
图:太阳能电池板 EL 检测照片(原始拍摄)
1.2 为什么需要裁剪工具?
实际拍摄时存在两个问题:
| 问题 | 描述 | 后果 |
|---|---|---|
| 透视畸变 | 相机无法正对面板拍摄,照片中的面板呈梯形/平行四边形 | 无法直接用于缺陷检测算法 |
| 多面板拼接 | 无人机拍摄一张图包含多块并排面板 | 需分割为单面板再检测 |
裁剪工具的作用:自动检测照片中面板的四个角点,通过透视变换矫正为标准矩形。下面是矫正后的效果:
| 原始EL照片(透视畸变) | 裁剪矫正后(标准矩形) |
|---|---|
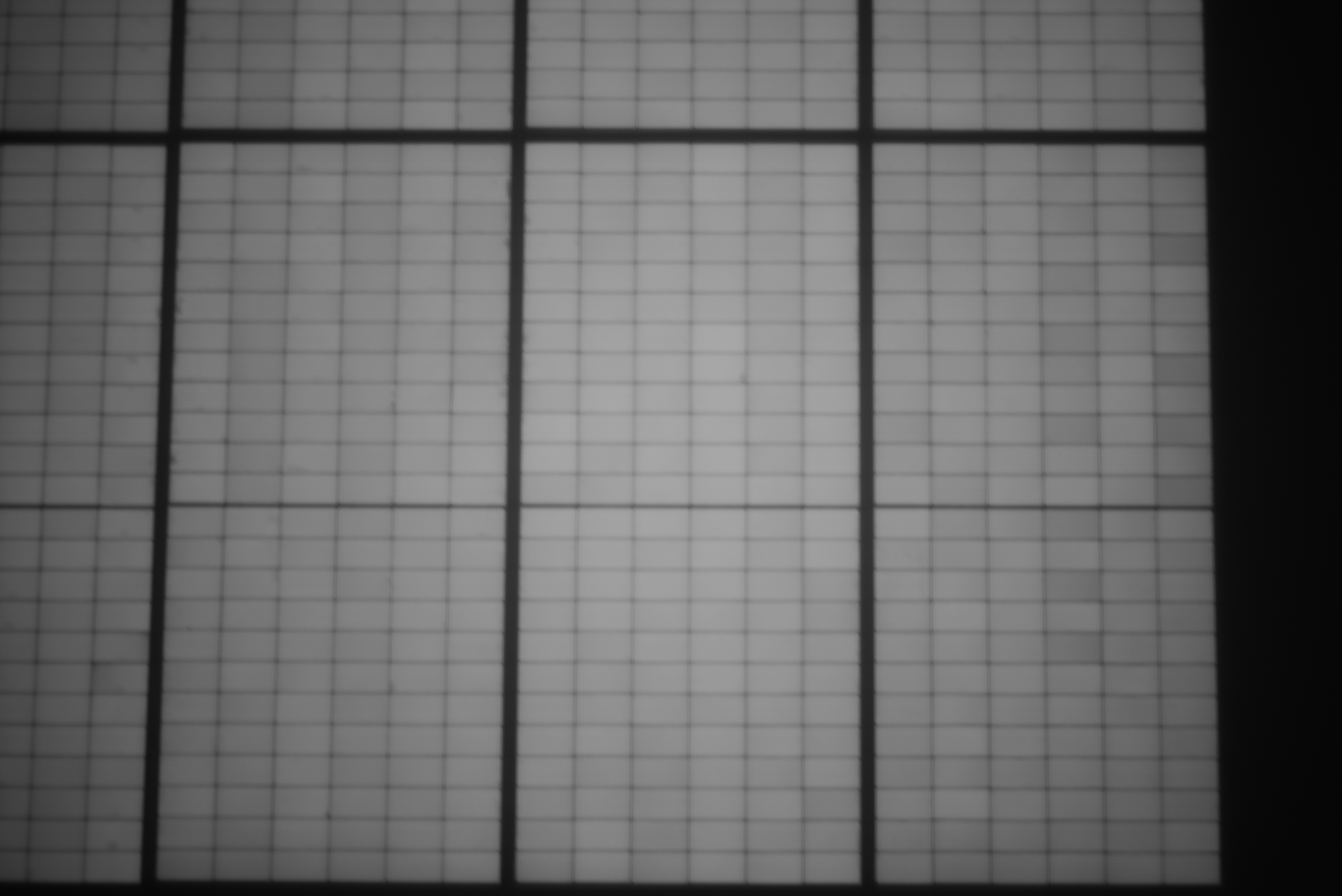 | 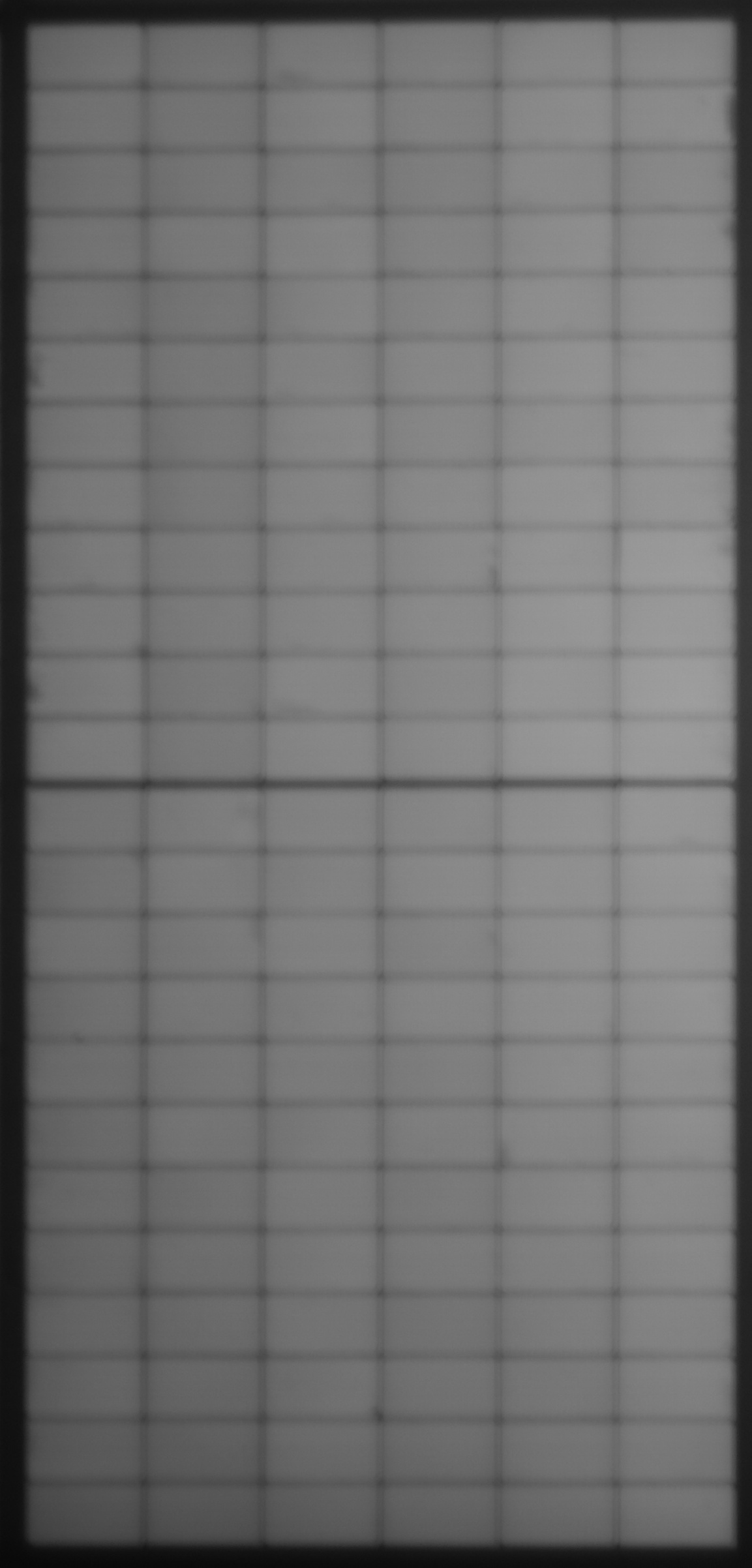 |
图:左侧为原始拍摄(存在透视畸变),右侧为裁剪程序自动检测角点并矫正后的标准矩形结果
1.3 核心工作流程
拍摄 EL 照片 → 上传到工具 → 自动检测四角 → 透视变换矫正 → 下载结果
↑ 检测失败时手动修正
↑ 修正记录存入学习系统,优化后续检测2. 整体架构概览
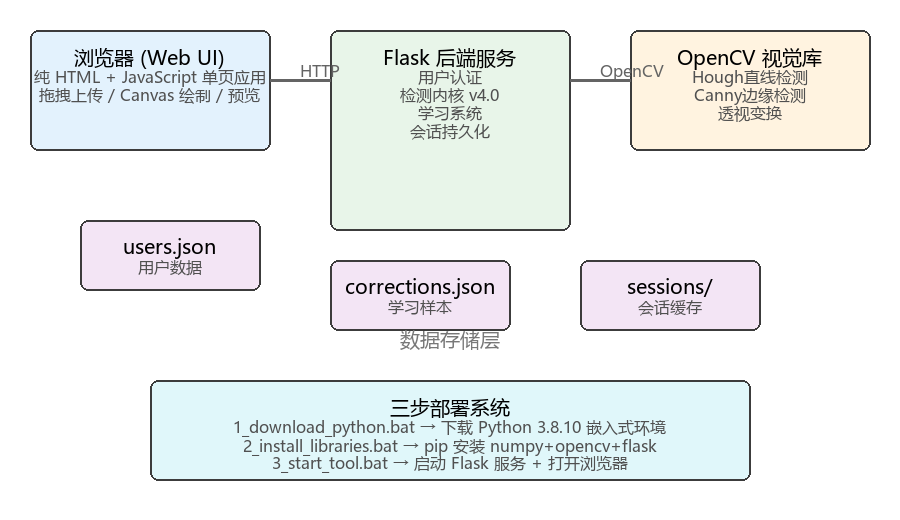
图:系统整体架构 — 浏览器(前端)→ Flask(后端)→ OpenCV(视觉计算)三层分离
┌─────────────────────────────────────────────────────────┐
│ 浏览器 (Web UI) │
│ 纯 HTML/JavaScript 单页应用 │
└────────────────────────┬────────────────────────────────┘
│ HTTP :15789
▼
┌─────────────────────────────────────────────────────────┐
│ Python Flask 服务端 │
│ ┌──────────┐ ┌────────────┐ ┌───────────────────┐ │
│ │ 用户认证 │ │ 检测内核 │ │ 学习系统 │ │
│ │ users.json│ │ v4.0+Hough│ │ corrections.json │ │
│ └──────────┘ └────────────┘ └───────────────────┘ │
│ ┌──────────┐ ┌────────────┐ │
│ │ 会话持久 │ │ 批量处理 │ │
│ │ sessions/ │ │ batch_* │ │
│ └──────────┘ └────────────┘ │
└─────────────────────────────────────────────────────────┘
│
▼
┌─────────────────────────────────────────────────────────┐
│ OpenCV 计算机视觉库 │
│ Hough直线检测 → Canny边缘检测 → fitLine精确化 → 透视变换 │
└─────────────────────────────────────────────────────────┘各层职责
| 层级 | 技术 | 职责 |
|---|---|---|
| 前端 | HTML + JavaScript | 图片上传/预览、角点编辑、结果展示 |
| 后端 | Python Flask | 认证鉴权、图像处理调度、学习系统、会话管理 |
| 视觉 | OpenCV | Hough直线检测、Canny边缘检测、透视变换计算 |
| 存储 | JSON 文件系统 | 用户数据、学习样本、会话缓存、日志 |
3. 目录结构详解
下面是项目的实际文件目录截图:

图:项目根目录的实际文件列表
华矩EL裁剪工具V1.1服务端/
│
├── 1_download_python.bat # 步骤①:下载 Python 3.8 嵌入式环境
├── 2_install_libraries.bat # 步骤②:安装 numpy/opencv/flask 依赖
├── 3_start_tool.bat # 步骤③:启动服务 + 打开浏览器
├── start_server_headless.bat # 后台静默启动(无窗口)
│
├── install_libs.py # 依赖安装脚本(pip 离线安装逻辑)
├── users.json # 用户账号数据(SHA256 加密存储)
├── server.log # 服务运行日志
├── .launcher_prefs # 启动器偏好设置
│
├── launcher.cs # 启动器源码(C# WinForms)
├── EL组件裁剪服务端_v4.exe # 编译后的启动器可执行文件
│
├── runtime/ # Python 3.8.10 嵌入式运行时(自动下载)
│
├── app/ # 核心应用目录
│ ├── app.py # ★ 主程序 ~2048 行(核心检测 + API)
│ ├── index.html # Web 前端界面 ~180KB
│ ├── batch_drone.py # 无人机模式批量处理脚本
│ ├── corrections.json # 普通模式学习样本库(~100KB)
│ ├── corrections_drone.json # 无人机模式学习样本库
│ ├── logo.ico / logo.png # 网站图标
│ └── sessions/ # 会话持久化目录(每会话一个子目录)
│ ├── {uuid}/
│ │ ├── meta.json # 会话元数据
│ │ └── img_*.jpg # 已处理图片缓存
│ └── ...
│
├── /blog/el-crop-v1/ # 本教程的截图和示意图
│
└── .claude/ # Claude AI 配置文件关键文件说明
| 文件 | 行数 | 作用 |
|---|---|---|
app.py | ~2048 | 一切核心所在:检测算法 + Flask API + 学习系统 |
launcher.cs | ~553 | C# 启动器,提供可视化窗口管理服务 |
index.html | ~180KB | 前端 UI,内含全部 CSS/JS(单页应用) |
batch_drone.py | ~117 | 无人机模式命令行批量处理脚本 |
4. 技术栈分析
4.1 后端
| 技术 | 用途 | 版本 |
|---|---|---|
| Python | 编程语言 | 3.8.10 |
| Flask | Web 框架 | 最新稳定版 |
| OpenCV | 计算机视觉 | 4.x |
| NumPy | 数值计算 | 最新稳定版 |
4.2 前端
- 纯 HTML/CSS/JavaScript — 无任何框架依赖
- 单页应用(所有逻辑在
index.html内) - 通过
fetchAPI 与后端交互 - Canvas 绘制角点标记支持手动拖拽
4.3 启动器
- C# WinForms — 编译为独立
.exe - 使用
.NET Framework4.0+ 编译 - 嵌入
logo.ico作为程序图标
4.4 关键依赖关系
# app.py 中的导入逻辑
import numpy as np # 数组运算
import cv2 # OpenCV 图像处理
from flask import Flask # Web 服务
import concurrent.futures # 多线程批量处理5. 计算机视觉核心算法
这是项目最精华的部分,检测内核 v4.0。
5.1 算法总流程图
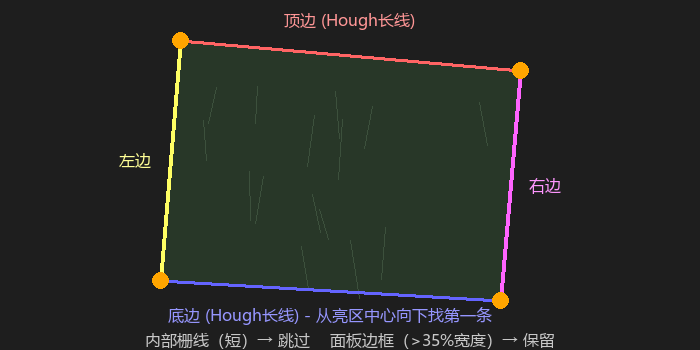
图:Hough直线检测法示意图。红色=顶边、蓝色=底边、黄色=左边、紫色=右边。内部短线条为电池片栅线(被跳过),仅保留跨越面板的边框长线。橙色圆点为检测到的四个角点。
输入图片
│
├─ 预处理:缩放 + 灰度 + 高斯去噪
│
├─ 主检测:[H] Hough 直线检测法 ★
│ ├─ Canny 边缘检测
│ ├─ HoughLinesP 找线段
│ ├─ 分类为水平线/垂直线
│ ├─ 筛选"长线"(>35%宽度的水平线,>15%高度的垂直线)
│ │ └─ 策略:底边从亮区中心向下找第一条长线
│ │ └─ 跳过内部栅线(短),定位到面板边框
│ ├─ 四线求交得到四个角点
│ └─ 宽高比验证(1.4 ~ 3.5)
│
├─ 备用:[B] 亮度 Otsu 阈值法
│ ├─ 多阈值尝试 × 9(100%~35%)
│ ├─ 形态学开闭运算去噪
│ ├─ 最大连通区域 → 凸包 → 四边形逼近
│ └─ 评分选择最优四边形
│
├─ 后处理:fitLine 亚像素精确化
│ ├─ 对每条边附近的边缘点做直线拟合
│ └─ 四线重新求交得到精确角点
│
├─ 叠加学习偏差(≥3条修正记录时生效)
│
├─ 外扩黑边(pad_pct 默认 0.5%~3%)
│
└─ 透视变换 → 输出矫正后的矩形图片5.2 核心代码逐段解读
5.2.1 角点排序(order_corners)
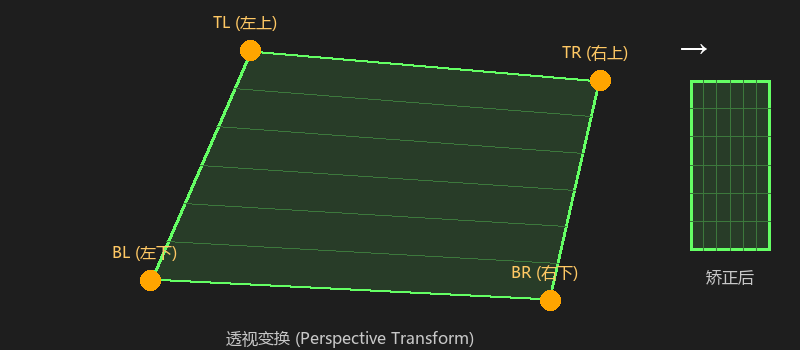
图:左侧为原始畸变图像中的四个角点(橙色圆点),右侧为经过透视变换矫正后的标准矩形。TL=左上、TR=右上、BR=右下、BL=左下。
def order_corners(pts):
"""将四个角点规范化为 [TL, TR, BR, BL] 顺序"""
pts = pts[np.argsort(pts[:, 1])] # 按 y 排序,上半为 top
top = pts[:2][np.argsort(pts[:2, 0])] # top 中按 x 排序 → TL, TR
bot = pts[2:][np.argsort(pts[2:, 0])] # bottom 按 x 排序 → BL, BR
return np.array([top[0], top[1], bot[1], bot[0]], dtype=np.float32)教学要点:
- NumPy 数组操作:
argsort排序、切片取子集 - 坐标系:图像坐标中 y 轴向下,y 值小 = 上方
- OpenCV 角点顺序约定:TL → TR → BR → BL
5.2.2 Hough 直线检测(主算法)
def _method_hough(gray, sh, sw, bcx, bcy):
"""Hough 直线检测法 — 找面板边框的四条直线"""
# 1. 边缘检测
blur = cv2.GaussianBlur(gray, (15, 15), 0)
edges = cv2.Canny(blur, 20, 60)
edges = cv2.dilate(edges, k, iterations=1) # 膨胀连接断线
# 2. Hough 概率直线检测
min_ll = int(min(sw, sh) * 0.10) # 最小线段长度 = 较短边的10%
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, threshold=40,
minLineLength=min_ll, maxLineGap=25)
# 3. 分类:水平线 vs 垂直线
h_lines, v_lines = [], []
for x1, y1, x2, y2 in lines_arr:
angle = abs(np.degrees(np.arctan2(y2 - y1, x2 - x1)))
if angle < 20 or angle > 160:
h_lines.append(...) # 水平线
elif 70 < angle < 110:
v_lines.append(...) # 垂直线
# 4. 筛选面板边框(跳过内部栅线)
long_h = sw * 0.35 # 面板边框是跨越 >35% 宽度的水平线
long_v = sh * 0.15 # 面板边框是跨越 >15% 高度的垂直线
# 5. 四条关键线的定位策略
# 底边:从亮区中心向下,取第一条长水平线 → 定位到面板底边框
# 顶边:从亮区中心向上,取第一条长水平线
# 左边:取最外侧(最小 x)的长竖线
# 右边:取最外侧(最大 x)的长竖线为什么要这样筛选?
EL 照片中,面板内部有密集的电池片栅线(短线),真正的面板边框是四条长线。
- 内部栅线:短,不到面板宽度 35%
- 面板边框:长,跨越整个面板宽度
- 底边特殊:下方可能有平台,必须从亮区中心往下找
5.2.3 四线求交
def seg_to_line(x1, y1, x2, y2):
"""将线段转换为标准直线表示 [vx, vy, x0, y0]"""
vx, vy = x2 - x1, y2 - y1
ln = max(np.hypot(vx, vy), 1e-6)
return [vx / ln, vy / ln, (x1 + x2) / 2, (y1 + y2) / 2]
def line_intersect(l1, l2):
"""计算两条直线交点(参数方程法)"""
vx1, vy1, x1, y1 = l1
vx2, vy2, x2, y2 = l2
d = vx1 * vy2 - vy1 * vx2 # 叉积判断是否平行
if abs(d) < 1e-6:
return None
t = ((x2 - x1) * vy2 - (y2 - y1) * vx2) / d
return np.array([x1 + t * vx1, y1 + t * vy1], dtype=np.float32)数学原理:
- 直线参数方程:$P = P_0 + t \cdot \vec{v}$
- 两直线交点解:对 $\vec{v_1}$ 和 $\vec{v_2}$ 联立求解
- $d = \vec{v_1} \times \vec{v_2}$ 判断平行(三维叉积的 z 分量)
5.2.4 fitLine 亚像素精确化
def _refine_corners_by_lines(gray, rough_pts, sw, sh):
"""Canny + fitLine 使角点精确到亚像素级别"""
edges = cv2.Canny(blur, 25, 75)
for i in range(4):
p1, p2 = o[i], o[(i + 1) % 4] # 当前边的两个端点
# 在边的法线方向 ± margin_n 范围内收集边缘点
tx, ty = dx / length, dy / length # 切向单位向量
nx, ny = -ty, tx # 法向单位向量
# 筛选带状区域内的点
sel = (np.abs(d_n) < margin_n) & \
(d_t > -margin_t) & (d_t < length + margin_t)
side_pts = pts_arr[sel]
# fitLine 拟合直线
line = cv2.fitLine(side_pts, cv2.DIST_L2, 0, 0.01, 0.01).flatten()原理:
- HoughLinesP 检测到的线段精度有限(像素级)
- 在线段附近的带状区域收集所有边缘点
- 对所有边缘点做最小二乘直线拟合 → 亚像素精度
- 四条边重新求交,获得比原始 Hough 更精确的角点
5.2.5 透视变换
def warp_image(img, pts, target_w=None, target_h=None):
tl, tr, br, bl = pts
# 计算目标尺寸
dw = int(max(np.linalg.norm(tr - tl), np.linalg.norm(br - bl)))
dh = int(max(np.linalg.norm(bl - tl), np.linalg.norm(br - tr)))
# 构造目标矩形
dst = np.array([[0, 0], [dw, 0], [dw, dh], [0, dh]], dtype=np.float32)
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(pts.astype(np.float32), dst)
# 执行变换
return cv2.warpPerspective(img, M, (dw, dh))核心理解:
getPerspectiveTransform:已知四边形四点 → 估算 3×3 变换矩阵warpPerspective:将每个像素映射到新位置(双线性插值)- 目标尺寸取四边的最大长度,保证无信息丢失
5.3 实际运行效果
在真实场景中运行裁剪工具的处理效果:
| 步骤 | 说明 |
|---|---|
| 原始EL照片 | 透视畸变的太阳能电池板照片 |
| 自动检测角点 | Hough 算法自动定位四个角点 |
| 透视变换矫正 | 将梯形矫正为标准矩形 |
| 裁剪结果 | 输出规整的矩形面板图像 |
从实际裁剪结果可以看到,矫正后的图像中电池片的栅线变得横平竖直,可直接用于后续的缺陷检测分析。
6. 后端 API 设计
6.1 API 列表
| 端点 | 方法 | 用途 | 需认证 |
|---|---|---|---|
/ | GET | 返回前端页面 | 否 |
/health | GET | 健康检查 | 否 |
/info | GET | 服务信息(GPU/版本/样本数) | 是 |
/auth/login | POST | 登录 | 否 |
/auth/logout | POST | 登出 | 是 |
/auth/status | GET | 登录状态 | 是 |
/auth/users | GET | 列出用户(管理员) | 是 |
/auth/users/add | POST | 添加用户 | 是 |
/auth/users/delete | POST | 删除用户 | 是 |
/auth/users/password | POST | 修改密码 | 是 |
/process | POST | 普通模式:裁剪一张图 | 是 |
/batch | POST | 批量处理多张图 | 是 |
/process_drone | POST | 无人机模式:一张图分三面板 | 是 |
/process_drone_single | POST | 无人机单面板重裁 | 是 |
/correction | POST | 保存手动修正记录 | 是 |
/corrections/list | GET | 列出学习样本 | 是 |
/correction/delete | POST | 删除学习样本 | 是 |
/session/save | POST | 保存会话 | 是 |
/session/load/<sid> | GET | 恢复会话 | 是 |
6.2 认证装饰器模式
AUTH_FREE_PATHS = {'/', '/logo', '/health', '/auth/status',
'/auth/login', '/auth/logout', ...}
@app.before_request
def require_login():
if request.path in AUTH_FREE_PATHS:
return None # 放行
if session.get('logged_in') is True:
return None # 已认证,放行
return jsonify({'ok': False, 'auth': False, 'error': 'login required'}), 401教学价值:Flask 的 before_request 钩子实现全局认证,简洁高效。
6.3 图片处理接口设计
@app.route('/process', methods=['POST'])
def process():
f = request.files.get('image')
pad = float(request.form.get('pad', 0.005))
forced = json.loads(request.form['corners']) if ... else None
img_name = request.form.get('name', None)
jpeg, corners, err = process_image(f.read(), pad, forced, img_name)
return jsonify({
'ok': True,
'jpeg_b64': base64.b64encode(jpeg).decode(), # Base64 传输图片
'corners': corners, # 角点坐标
'ms': round((time.time()-t0)*1000) # 耗时
})设计要点:
- 图片通过
multipart/form-data上传 - 返回用 Base64 编码 JPEG,前端直接显示
- 支持
forced参数传递手动角点(跳过自动检测) - 返回处理耗时(ms)供前端展示
6.4 多线程批量处理
WORKERS = min(os.cpu_count() or 4, 8)
pool = concurrent.futures.ThreadPoolExecutor(max_workers=WORKERS)
def proc(f, name):
return process_image(f.read(), pad, forced, name, ...)
futures = {pool.submit(proc, f, n): i for i, (f, n) in enumerate(zip(fs, names))}
for fut, idx in futures.items():
jpeg, corners, err = fut.result()
results[idx] = ... # 保持原始顺序教学价值:ThreadPoolExecutor 的典型使用模式,注意用 dict 保持任务与结果的对应关系。
7. 前端界面设计
7.1 技术选型
- 零框架:纯 HTML + CSS + JavaScript
- 单页应用:所有逻辑在
index.html中 - 交互方式:
- 拖拽上传图片
- Canvas 绘制裁剪预览
- 拖拽角点进行手动修正
7.2 登录页面

图:工具启动后打开的登录页面,输入用户名和密码即可登录。
7.3 已登录主界面

图:登录后的主界面。包含图片上传区、裁剪预览区域、参数设置等核心功能模块。
7.4 主要功能页面
| 页面/模块 | 功能 |
|---|---|
| 登录页 | 用户名/密码登录 |
| 上传区 | 拖拽或点击选择图片 |
| 预览区 | 显示自动检测结果(角点标记 + 矫正预览) |
| 编辑区 | 拖拽 4 个橙色角点进行手动修正 |
| 结果页 | 下载裁剪后的图片 |
| 用户管理(管理员) | 添加/删除用户,修改密码/角色 |
| 学习系统看板 | 查看偏差数据、样本列表 |
7.5 与后端交互方式
// 上传图片(fetch API)
async function uploadImage(file, pad, corners) {
const formData = new FormData();
formData.append('image', file);
formData.append('pad', pad);
if (corners) formData.append('corners', JSON.stringify(corners));
const resp = await fetch('/process', { method: 'POST', body: formData });
const data = await resp.json();
if (data.ok) {
// data.jpeg_b64 → 直接显示
// data.corners → 在 Canvas 上绘制
// data.ms → 显示处理耗时
}
}8. 启动器与部署系统
8.1 三步部署设计
极具工程实用价值的设计——完全不懂编程的用户也能用:
步骤1:1_download_python.bat → 下载 Python 3.8.10 嵌入式环境到 runtime/
步骤2:2_install_libraries.bat → 通过 pip 安装 numpy + opencv + flask
步骤3:3_start_tool.bat → 启动 Flask 服务 + 打开浏览器8.2 嵌入式 Python
:: 下载 Python 嵌入式发行版(~8MB)
set PY_URL=https://www.python.org/ftp/python/3.8.10/python-3.8.10-embed-amd64.zip
curl -k -L --retry 3 --progress-bar -o "%PY_ZIP%" "%PY_URL%"
:: 解压到 runtime/
powershell -Command "Expand-Archive -Path '%PY_ZIP%' -DestinationPath '%PYDIR%' -Force"嵌入式 Python 的特点:
- 体积小(~8MB vs 完整安装 ~30MB)
- 免安装,解压即用
- 不依赖系统 Python,和项目捆绑
8.3 pip 离线安装
# install_libs.py 中的代理清理和 SSL 处理
for k in ['HTTP_PROXY', 'HTTPS_PROXY', ...]:
os.environ.pop(k, None)
# 自定义下载器(处理 SSL 证书问题)
ctx = ssl.create_default_context()
ctx.check_hostname = False
ctx.verify_mode = ssl.CERT_NONE为什么需要这些?
- 工厂/企业内部网络可能有代理
- 老旧 Windows 系统 SSL 证书可能过期
- 多重下载策略保证成功率
8.4 C# 启动器(launcher.cs)
启动器提供可视化管理界面(如下图所示),功能包括:
 (实际启动器程序图标和位置)
(实际启动器程序图标和位置)
| 功能 | 技术实现 |
|---|---|
| 启动/停止服务 | Process 启动 Python,taskkill 停止 |
| 状态监控 | Timer 每隔 5 秒检查后端和前端是否运行 |
| 端口配置 | 用户可修改端口(默认 15789) |
| 防火墙规则 | 自动添加 Windows 防火墙放行规则 |
| 用户管理 | 内置用户 CRUD(增删改查) |
| 局域网 IP 检测 | Socket 连接 DNS 获取本机 IP |
关键代码片段:
// 获取局域网 IP(经典实现)
static string GetLanIp() {
using (var s = new Socket(AddressFamily.InterNetwork,
SocketType.Dgram, ProtocolType.Udp)) {
s.Connect("114.114.114.114", 80); // 不真正发送数据
return (s.LocalEndPoint as IPEndPoint).Address.ToString();
}
}
// 健康检查
static bool TestBackend() {
using (var c = new TcpClient()) {
var ar = c.BeginConnect("127.0.0.1", Port, null, null);
return ar.AsyncWaitHandle.WaitOne(350); // 350ms 超时
}
}8.5 启动器密码保护
static bool CheckPassword() {
// 内置密码验证(XOR 编码防止明文)
var pwd = "";
foreach (int x in new int[] { 0x3d, 0x3f, 0x3f, 0x36 })
pwd += (char)(x ^ 0x55); // 解码后 = "hjjc"
}9. 用户认证与权限管理
9.1 密码存储
import hashlib, base64, os
def _new_salt():
"""生成 16 字节随机盐"""
return base64.b64encode(os.urandom(16)).decode()
def _hash_password(password, salt):
"""SHA256(salt + password)"""
return base64.b64encode(
hashlib.sha256((salt + password).encode()).digest()
).decode()为什么加盐?
- 不加盐:相同密码产生相同哈希 → 彩虹表攻击
- 加盐:每个用户盐值不同 → 即使密码相同哈希值也不同
9.2 用户数据格式
{
"users": [
{
"username": "admin",
"password_hash": "DuFVlINbDXCIeCDWZDhI+GojeT+0vGUaK1J3CNsVwKs=",
"salt": "TnMpOFGYcteAkJ73uY7Lkg==",
"role": "admin",
"created_at": "2026-04-25 18:29:03"
}
]
}9.3 两角色权限
| 角色 | 可操作 |
|---|---|
| 管理员 | 裁剪图片 + 管理用户(增删改) |
| 普通用户 | 仅裁剪图片 |
10. 学习系统(偏差累积)
10.1 设计思路
这是项目的特色功能——让算法从人工修正中”学习”。
用户手动调整角点 → 保存修正记录 → 计算偏差均值 → 后续检测自动补偿偏差10.2 偏差计算
def _update_learned_bias():
for c in corrections:
auto = np.array(c['auto']) # 算法检测的角点
manual = np.array(c['manual']) # 人工修正后的角点
delta = manual - auto # 四边偏差
# 每条边取平均(像素级偏差 / 图像尺寸 → 比例偏差)
top_l.append( ((delta[0][1] + delta[1][1]) / 2) / H )
bot_l.append( ((delta[2][1] + delta[3][1]) / 2) / H )
left_l.append( ((delta[0][0] + delta[3][0]) / 2) / W )
right_l.append(((delta[1][0] + delta[2][0]) / 2) / W )
# 取所有偏差的均值(转换为比例)
_learned_bias = {
'top': float(np.mean(top_l)), # 上边偏差比例
'bot': float(np.mean(bot_l)), # 下边偏差比例
'left': float(np.mean(left_l)), # 左边偏差比例
'right': float(np.mean(right_l)), # 右边偏差比例
'n': len(corr) # 样本数
}10.3 偏差应用
def _apply_learned_bias(pts, W, H):
"""将学习偏差叠加到检测角点,至少 3 条记录才生效"""
if bias['n'] < 3:
return pts # 样本不够,不启用
pts = pts.copy()
# 上边:TL.y += bias.top * H, TR.y += bias.top * H
pts[0][1] += bias['top'] * H
pts[1][1] += bias['top'] * H
# 下边:BR.y += bias.bot * H, BL.y += bias.bot * H
pts[2][1] += bias['bot'] * H
pts[3][1] += bias['bot'] * H
# 左边:TL.x += bias.left * W, BL.x += bias.left * W
pts[0][0] += bias['left'] * W
pts[3][0] += bias['left'] * W
# 右边:TR.x += bias.right * W, BR.x += bias.right * W
pts[1][0] += bias['right'] * W
pts[2][0] += bias['right'] * W
return pts10.4 偏差分析
def _compute_analysis(corrections):
"""分析所有手动修正,计算建议的 pad 值"""
outward_projs, pad_corrections = [], []
for c in corrections:
delta = manual - auto
# 计算各边"外扩"趋势
centroid = auto.mean(axis=0)
dirs = auto - centroid
outward = (delta * dirs).sum(axis=1).mean()
pad_corrections.append(outward / H)
suggested_pad = current_pad + mean_pad_corr
# 输出:建议调整 pad 值教学要点:
- 偏差以比例而非像素存储 → 适配不同分辨率的图片
- 3 条记录作为最小生效阈值 → 避免偶然偏差
- 四边独立计算 → 更精细的补偿
11. 无人机拍摄模式
11.1 问题定义
无人机拍摄的 EL 照片通常包含 3 块并排的太阳能面板,需要:
- 检测面板行(垂直位置)
- 检测面板间分隔缝 → 分割为独立面板
- 逐个裁剪并统一尺寸输出
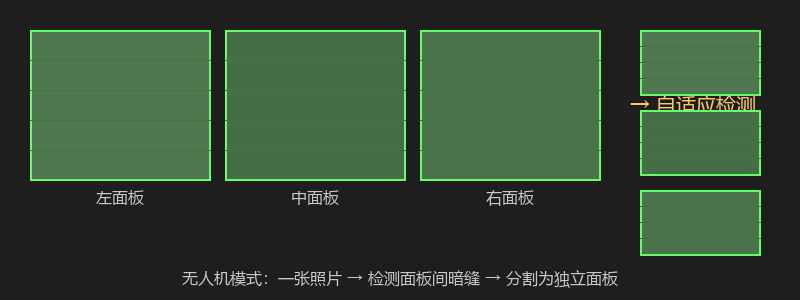
图:无人机模式的核心流程 — 从一张包含多块面板的照片中,自适应检测面板间暗缝,将各面板分割并独立裁剪输出。
11.2 实际运行效果
无人机模式可将一张照片中自动检测到的面板逐一裁剪输出。下面是实际裁剪的一个面板结果:
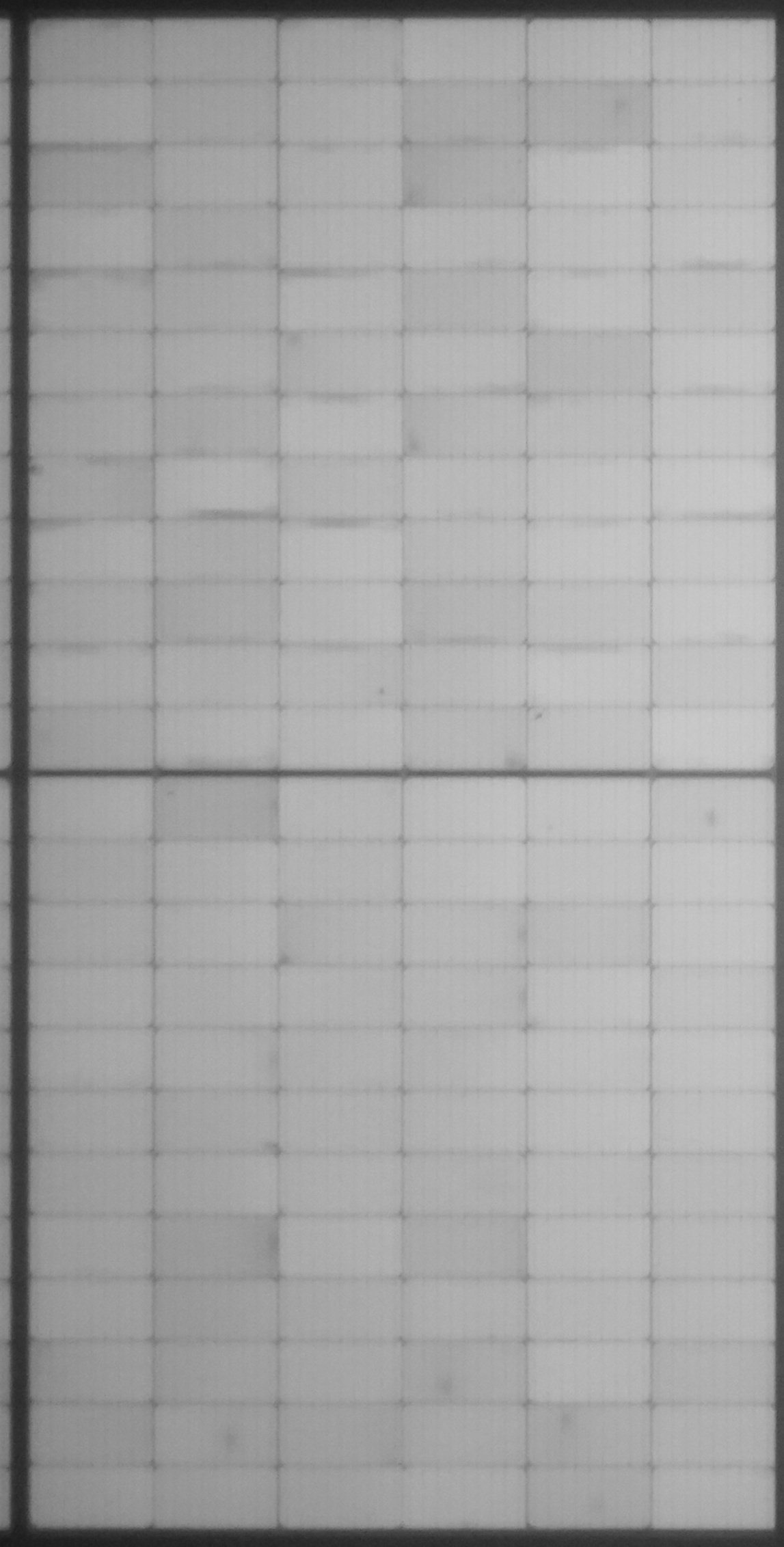
图:无人机模式自动裁剪输出的单个面板结果(5107×1469 像素),已经过透视变换矫正为标准矩形。
11.3 面板区域检测
def _drone_find_panel_region(gray):
"""在图中找到主导面板行的垂直范围"""
# 1. Otsu 分割找到整体亮区
_, mask = cv2.threshold(blur, otsu_val * 0.5, 255, cv2.THRESH_BINARY)
# 2. 在中间列做行亮度投影
strip = gray[:, x_mid_s:x_mid_e]
row_mean = strip.mean(axis=1) # 每行平均亮度
row_smooth = GaussianBlur(row_mean) # 平滑
# 3. 找所有亮带(连续亮度 > 阈值)
# 4. 合并"薄而浅"的内部分隔(半片电池分隔线)
# 5. 取最高的亮带作为面板行11.4 面板数量自适应检测
def _drone_detect_n_panels(gray, region, max_panels=3):
"""自适应检测实际面板数量(1~3块)"""
# 1. 在面板行水平范围内做列投影
col_smooth = GaussianBlur(col_mean)
# 2. 找所有波谷(面板间暗缝)
# 3. 按深度排序,去重(近距离保留最深)
# 4. 用波谷位置分割出候选面板区域
# 5. 验证和过滤
# - 宽度 < 8% 总宽的段丢弃
# - 平均亮度低于阈值丢弃
# - 贴画幅边缘且宽度不足 75% 中位宽度的丢弃(被截断的半面板)11.5 面板完整性判断
def _panel_is_complete(pts_full, W, H, margin_frac=0.02):
"""判断面板是否完整(未被画幅裁切)"""
margin_x = W * margin_frac
margin_y = H * margin_frac
for x, y in pts_full:
if x < margin_x or x > W - margin_x:
return False # 左右被截断
if y < margin_y or y > H - margin_y:
return False # 上下被截断
return True这个函数的逻辑:如果角点贴边(距图像边缘 < 2%),说明面板超出了画面范围,不完整的面板跳过裁剪。
12. 项目亮点与可借鉴设计
12.1 工程亮点
| 亮点 | 说明 |
|---|---|
| 零依赖部署 | 嵌入式 Python + 自动装依赖,用户无需搭建环境 |
| 双算法容错 | Hough 主算法失败时自动降级为亮度法 |
| 学习系统 | 人工修正自动累积为偏差补偿 |
| 会话持久化 | 关闭浏览器后恢复进度 |
| GPU 加速 | 自动检测 OpenCL,启用 GPU 加速 |
| 局域网访问 | 自动获取 IP,局域网内任意设备可访问 |
12.2 从教学角度的可学知识点
Python / Flask:
@app.before_request全局钩子实现认证ThreadPoolExecutor多线程批量处理- Session 管理用户状态
- 大文件上传的
MAX_CONTENT_LENGTH配置
OpenCV / 计算机视觉:
cv2.HoughLinesP— 概率 Hough 直线检测cv2.Canny— 边缘检测cv2.fitLine— 亚像素直线拟合cv2.getPerspectiveTransform+warpPerspective— 透视变换cv2.connectedComponentsWithStats— 连通区域分析cv2.convexHull— 凸包计算
C# / WinForms:
Process类管理子进程System.Windows.Forms.Timer周期状态检查SHA256密码哈希ListView展示用户列表
工程实践:
- 三步批处理部署策略
- 嵌入式 Python 环境
- 自动加防火墙规则
- 多重下载机制保证安装成功率
12.3 可改进方向
| 方向 | 建议 |
|---|---|
| 安全性 | 使用 JWT 替代 Flask session(适合无状态 API) |
| 部署 | 打包为 Docker 镜像 |
| 前端 | 迁移到 Vue/React 框架 |
| 算法 | 引入深度学习(如 YOLO 角点检测)替代 Hough |
| 性能 | 使用 Redis 缓存会话,替代文件系统 |
本教程基于 EL裁剪工具 项目源码编写。 这是一个将计算机视觉、Web 服务、桌面应用三者结合的完整工业案例。
截图和示意图位于项目根目录的
/blog/el-crop-v1/文件夹下。